
 (li��n)ϵ�҂�...
(li��n)ϵ�҂�...  �A��܇��ʩ���r(sh��)��(bi��o)�߿��Ƶĵȷ�ֱ...
�A��܇��ʩ���r(sh��)��(bi��o)�߿��Ƶĵȷ�ֱ...  �¼��g(sh��)IDITI ���������S���ػ�̎...
�¼��g(sh��)IDITI ���������S���ػ�̎...  �h�L�����zַ���o(h��)�^(q��)���ü��_�l(f��)ס...
�h�L�����zַ���o(h��)�^(q��)���ü��_�l(f��)ס...  ��У���A(ch��)�O(sh��)ʩ���O(sh��)BOT�(xi��ng)Ŀ�о�...
��У���A(ch��)�O(sh��)ʩ���O(sh��)BOT�(xi��ng)Ŀ�о�...  �����ľ�����W(w��ng)��(ji��n)��...
�����ľ�����W(w��ng)��(ji��n)��...  ��(j��)�䉺��(sh��)ɰʯ�|���������^(q��)��ʩ...
��(j��)�䉺��(sh��)ɰʯ�|���������^(q��)��ʩ...  ��̼���н��O(sh��)��������̽���c��(sh��)�`...
��̼���н��O(sh��)��������̽���c��(sh��)�`...  �\Մ�Ї��Ŵ����������c�����İl(f��)...
�\Մ�Ї��Ŵ����������c�����İl(f��)...  �h�L�����zַ���o(h��)�^(q��)��(n��i)���ü��_�l(f��)...
�h�L�����zַ���o(h��)�^(q��)��(n��i)���ü��_�l(f��)...  ���Ͱl(f��)늙C(j��)���Ļ��(z��i)Σ�U(xi��n)��e��...
���Ͱl(f��)늙C(j��)���Ļ��(z��i)Σ�U(xi��n)��e��...  ������͙C(j��)е�S����Ҏ(gu��)���O(sh��)Ӌ(j��)...
������͙C(j��)е�S����Ҏ(gu��)���O(sh��)Ӌ(j��)...  ����ʮλ������������B������Ʒ...
����ʮλ������������B������Ʒ...  ����������ˇ�g(sh��)�^(q��)�����O(sh��)Ӌ(j��)��һ��...
����������ˇ�g(sh��)�^(q��)�����O(sh��)Ӌ(j��)��һ��...  ���u��������Ƽ����(d��ng)�����O(sh��)Ӌ(j��)...
���u��������Ƽ����(d��ng)�����O(sh��)Ӌ(j��)... ��x 3565 �� �L��·����ǰ��ʽ����ģ��ͨ�L(f��ng)����ϵ�y(t��ng)ԭ���O(sh��)Ӌ(j��)�о�
�L��·����ǰ��ʽ����ģ��ͨ�L(f��ng)����ϵ�y(t��ng)ԭ���O(sh��)Ӌ(j��)�о�
��ȫ�l(w��i)1��������2
1�F��ʡ���x��·�����֣��F�����x563000��2�����Ͻ�ͨ��W(xu��)��üУ�^(q��)���Ĵ���ü614202)
����ɽ�^(q��)�L��·����������(g��)��·����ռ�����O������܇��������(n��i)���r(sh��)�ų��ďU��;���ĉm����(hu��)���K��܇��ȫ�͌�(du��)���w���Σ����ͬ�r(sh��)�����L������������Y(ji��)��(g��u)�ͭh(hu��n)���l���֘O�������܇�������T�l(f��)�ش�ͨ�¹ʡ��鱣�C܇�v��������(n��i)���ٰ�ȫ�������õ���܇�h(hu��n)�����茦(du��)�����M(j��n)��ͨ�L(f��ng)�����M(j��n)����ͨ�L(f��ng)����ϵ�y(t��ng)����ĵĶ��(xi��ng)ϵ�y(t��ng)���\(y��n)�I�������Ŀ��ƹ��������M(j��n)�ɿ����\(y��n)�Iͨ�L(f��ng)���Ƽ��g(sh��)���L��·�����\(y��n)�I��ȫ����ͨ�ı��ϣ��nj�(sh��)�F(xi��n)�ߵȼ�(j��)��·�����١���Ч����ȫ�����m�����P(gu��n)�I���g(sh��)֮һ��
��(du��)���L��·�������\(y��n)�Iͨ�L(f��ng)��ʽ������������o(j��)80���������(n��i)��90������_ʼ���ѻ����Ϗ�ȫ�M��ʽ���M��ʽ��׃���v��ͨ�L(f��ng)��ʽ������(n��i)������о������̌�(sh��)�`�������v��ͨ�L(f��ng)��ʽ�c������ʽ��������ڽ�������r(ji��)���s�̽������ڣ���(ji��)�s�\(y��n)�I�_֧����Ŀǰ�ѳɞ��҇��L��·�����\(y��n)�Iͨ�L(f��ng)��������ʽ������ͨ�L(f��ng)���Ʒ��棬�M��ʽͨ�L(f��ng)��ʽ�������L(f��ng)�c܇�v���߷����ֱ���P(gu��n)ϵ��܇�v�ų����к����w�����m�ڶ̕r(sh��)�g��(n��i)���ų���ͨ�L(f��ng)���������Æμ����wϵ�M(j��n)��ģ�M�����ڿv��ʽͨ�L(f��ng)�У��к����w�����m���܇������(d��ng)�����ȷֲ��S���g���r(sh��)�g���xɢ�ģ��c��ͨ��܇�v�N�܇�v�����ٶȵIJ���׃�����P(gu��n)����Ҫ���ͨ�L(f��ng)��Ҳ�Dz���׃���ġ��c�����m��(y��ng)��ͨ�L(f��ng)�O(sh��)����\(y��n)�D(zhu��n)��܇����(n��i)���L(f��ng)��Ҳ��׃���ġ����ͨ�L(f��ng)����׃��ʮ�֏�(f��)�s��
1.ͨ�L(f��ng)���Ʒ���
����ͨ�L(f��ng)���Ʒ������¿ɷ֞��Ԅ�(d��ng)���ƺ��ք�(d��ng)���ƃ���Ԅ�(d��ng)���Ʒ������O(sh��)����������(n��i)�ğ��F�^�ʂ�������һ����̼��Ȃ�������܇�v�z�y(c��)�����L(f��ng)���c�L(f��ng)�ٜy(c��)ԇ�x���õ��Ă�����̖(h��o)��ͨ�^���ƾW(w��ng)�j(lu��)�M(j��n)���L(f��ng)�����ơ��ք�(d��ng)���Ʒ����ǿ��˹��ٿv�x�������L(f��ng)�������֞�(li��n)��(d��ng)�����c�Ϊ�(d��)���ơ������L������ͨ�L(f��ng)���ƣ�Ŀǰ����(n��i)����Ҫ�����Ԅ�(d��ng)���ƞ������ք�(d��ng)���ƞ��o���ֶεķ�ʽ�������ƾ�����С��������ā��S��������(n��i)���õ�ҕ�X�h(hu��n)�������ƿ՚���Ⱦ��B(t��i)�����S�ķ���֮��(n��i)���Լ��ܼ��r(sh��)��Ч��̎�����(z��i)�Ⱦo���B(t��i)��Ŀ�ġ�Ŀǰ����(n��i)��������ͨ�L(f��ng)�Ԅ�(d��ng)�����в��õ���Ҫ�����к������Ʒ�(Ҳ�QFB���Ʒ�)��������Ʒ���ǰ��ʽ���Ʒ�(Ҳ�Qr FF���Ʒ�)��ǰ��ʽ����ģ�����Ʒ���
1.1����ʽ���Ʒ�
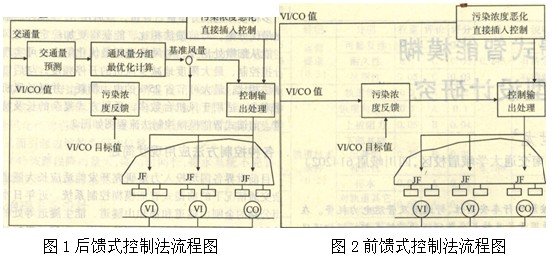
ԓ������ͨ�^�ֲ���������(n��i)���c(di��n)�ğ��F�^�ʂ�������һ����̼��Ȃ�������ֱ�әz�y(c��)���܇�v�ŷų��ğ��F��Ⱥ�C0���ֵ����������(n��i)��(d��ng)ǰ����Ⱦ���(VIֵ��C0ֵ)�c����Ŀ��(bi��o)ֵ�M(j��n)�б��^���Բ����^Ŀ��(bi��o)ֵ��ԭ�t����(j��ng)Ӌ(j��)��̎���o��������̖(h��o)����(du��)�L(f��ng)�C(j��)���L(f��ng)�����\(y��n)�D(zhu��n)�_(t��i)��(sh��)�M(j��n)�п��ơ�����VI��C0�����Ϣ�ĺ���ʽ���Ʒ��^�麆(ji��n)�Ρ�ֱ�ӣ��҇��S������Ŀǰ�^�ձ�����@�N��ʽ������ʽ���Ɵo�A(y��)�y(c��)���ܣ��c��(sh��)�B(t��i)���a(ch��n)�����t�F(xi��n)��ͬ�r(sh��)�L(f��ng)�C(j��)�\(y��n)�D(zhu��n)�oۙ�ԣ����\(y��n)�D(zhu��n)�r(sh��)�g�^�L���ڽ�ͨ�ΑB(t��i)׃������܇�v���ߕr(sh��)���a(ch��n)������(d��ng)�������M(j��n)���L(f��ng)���֓�(d��n)���ơ��m�����L(f��ng)�C(j��)�_(t��i)��(sh��)�^�ٵ��ж�����������ʽ���Ʒ����̈D��D1��
1.2������Ʒ�
ԓ���������]VI��C0��ȼ���ͨ����׃����r�����ǰ��r(sh��)�g�^(q��)�g(��ו��cҹ������(ji��)�����cƽ�r(sh��))�A(y��)�Ⱦ��ɳ���������L(f��ng)�C(j��)�\(y��n)�D(zhu��n)��
1.3ǰ�����Ʒ�
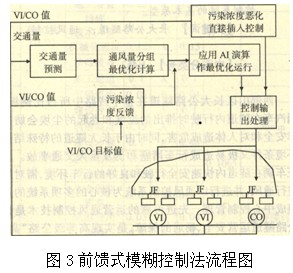
ԓ���������M(j��n)������ǰ�^(q��)�εĽ�ͨ����Ϣ������(n��i)��܇�v�z�y(c��)������(sh��)�r(sh��)�˽�������(n��i)��ͨ������܇�ٶȡ�܇�v��(g��u)�ɵȣ�ͨ�^�z�y(c��)��ͨ����r����(du��)�Ժ�Ľ�ͨ���M(j��n)���A(y��)�y(c��)����������ͨ���������Ô�(sh��)ֵģ�M�ֶ�Ӌ(j��)����Ժ�һ�Εr(sh��)�g��(n��i)����Ⱦ���(�S�r(sh��)�g�����g�ķֲ��ΑB(t��i))ǰ����̖(h��o)�������]��VI��������C0�������y(c��)��������Ⱦ���Ⱥ�����̖(h��o)����ǰ����̖(h��o)�ͷ�����̖(h��o)��ͬ��Ɍ�(du��)�L(f��ng)�C(j��)���L(f��ng)�����\(y��n)�D(zhu��n)�_(t��i)��(sh��)���M(j��n)�п��ơ��˷��ܸ���(j��)��ͨ����׃������(du��)�L(f��ng)�C(j��)�M(j��n)��ۙ���ƣ����a(ch��n)����IJ���(d��ng)�F(xi��n)�ɰ��A(y��)���O(sh��)���Ę�(bi��o)��(zh��n)ģʽ����һ��������(n��i)�M(j��n)���L(f��ng)���֓�(d��n)���ơ��c����������ȣ��ɹ�(ji��)ʡ5����늺ġ��m�����L(f��ng)�C(j��)�_(t��i)��(sh��)�^������L������ǰ��ʽ���Ʒ����̈D��D2��
1.4ǰ��ʽ����ģ�����Ʒ�
ԓ����������(g��u)���cǰ��ʽ���Ʒ���ͬ���nj�ǰ����̖(h��o)�c������̖(h��o)ݔ��AIģ��������������ģ����Փ�M(j��n)�����ݣ������Nģ�Mͨ�L(f��ng)�����M(j��n)���u(p��ng)�r(ji��)�������AIģ��������������(y��u)�������cǰ������ȣ��ܫ@�ø��ӷ�(w��n)����ͨ�L(f��ng)Ч�����ļ�(x��)̎���l(f��)����(du��)�L(f��ng)�C(j��)�M(j��n)���(y��u)���M�ϣ��Ɍ�(sh��)�F(xi��n)�L(f��ng)���֓�(d��n)���ƣ�����ȵp���L(f��ng)�C(j��)���_ͣ�l�ȡ��c����ʽ���Ʒ���ȣ����ɹ�(ji��)ʡ25����������ģ������L�L(f��ng)�C(j��)��ʹ�É������m�����L(f��ng)�C(j��)�_(t��i)��(sh��)�࣬ͨ�L(f��ng)��ʽ��(f��)�s���L�����L������ǰ��ʽ����ģ�����Ʒ����̈D��D3��
2.���N���Ʒ�����(y��ng)�ìF(xi��n)�(ji��n)��
Ŀǰ���������Ͷ�������о��_�l(f��)���m��(y��ng)�L�������͏�(f��)�s��ͨ��r�µ�ǰ��ʽ����ģ������ϵ�y(t��ng)�������ձ��ھ��ݹ�·�Ľ���ɽ������֪ɽ����������������̎��ͨ�L(f��ng)�������M(j��n)����ԓ���Ʒ�ʽ�Č�(sh��)�(y��n)��(y��ng)�ã��յ��˘O�õ�Ч���������_ͨ�Ė|�����M�·����������(�p���L9.6 km������ͨ���Q�����ſv��ͨ�L(f��ng))��ȫ�������ԓ���Ʒ�����Ӌ(j��)���ڽ��ڌ�(du��)�\(y��n)�I�е��P(gu��n)Խ�������L������(�@Щ����Ŀǰ��Ҫ���ú�������)��ͨ�L(f��ng)�����M(j��n)��ȫ����¸��졣����(n��i)Ŀǰ���ѽ��ɵ��L��·��������Ҫ�����Գ�����Ʒ��ͺ���ʽ���Ʒ�������ͨ�L(f��ng)���Ʒ�������δ�M(j��n)��ǰ��ʽ���Ʒ���ǰ��ʽ����ģ�����Ʒ����о��_�l(f��)������ǰ��ʽ���Ʒ���ǰ��ʽģ�����Ʒ���ͨ�L(f��ng)����ϵ�y(t��ng)�������@����ͨ�L(f��ng)Ч����������܇���m�ȣ������܇��ȫ�Լ��A(y��)���ش���(z��i)�������ش�ͨ�¹ʵİl(f��)��������܇�vͨ��������߀�ɹ�(ji��)�s������ġ��_�l(f��)�о��m��(y��ng)�҇�������L��·ǰ��ʽ����ģ��ͨ�L(f��ng)����ϵ�y(t��ng)���������҇��F(xi��n)�пv��ͨ�L(f��ng)���g(sh��)�����ͨ�L(f��ng)�O(sh��)�����Ч�����ʣ���(ji��)ʡ������ģ�������܇��ȫ���m�ȣ��ЏV韵đ�(y��ng)��ǰ���;�ļ��g(sh��)��(j��ng)��(j��)Ч�档ǰ��ʽ����ģ������ϵ�y(t��ng)�ѳɞ����L��·�����\(y��n)�Iͨ�L(f��ng)���Ƽ��g(sh��)��ǰ���I(l��ng)��Ͱl(f��)չ����Ҫ����
3.ǰ��ʽ����ģ������ϵ�y(t��ng)ԭ�͵����
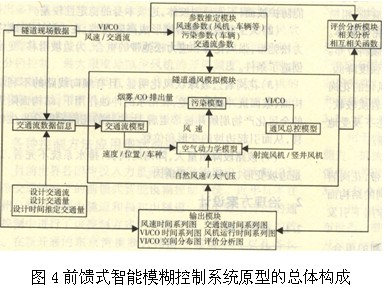
��(j��ng)�^��(du��)�N���Ʒ��������c(di��n)���䑪(y��ng)�ìF(xi��n)��������P������˿��m�����L�����L��·������ǰ��ʽ����ģ��ͨ�L(f��ng)����ϵ�y(t��ng)�Ļ���ԭ�͡�ԓԭ����Ҫ�����IJ��փ�(n��i)�ݣ���ͨ���A(y��)�y(c��)ģ�͡��՚��(d��ng)���W(xu��)ģ�͡���Ⱦģ�ͼ�ǰ��ʽ����ģ��������������
3.1��ͨ���A(y��)�y(c��)ģ��
ģ�M������(n��i)܇�v������B(t��i)���������ڌ�(du��)܇�v�ķN��M(j��n)���Єe��ͬ�r(sh��)������(du��)δ���Ľ�ͨ������܇�ٺ���܇λ��(������ͬҎ(gu��)ģ�Ľ�ͨ���������(z��i)����ͨ�¹ʵȾo����r�����ͻ׃)�M(j��n)���A(y��)�y(c��)��ģ�M���Դ�����՚��(d��ng)���W(xu��)��Ӌ(j��)�����Ⱦ����Ӌ(j��)��Ļ��A(ch��)��
3.2�՚��(d��ng)���W(xu��)ģ��
����ģ�M������(n��i)���L(f��ng)���L(f��ng)�١��C�Ͽ��]��ͨ��ͨ�L(f��ng)�������C(j��)е���������������w�pʧ������Ȼͨ�L(f��ng)�������w�T���������ص�Ӱ푡�
3.3��Ⱦģ��
����ģ�M������(n��i)����Ⱦ��B(t��i)��C0��VI�ĕr(sh��)�g�Ϳ��g�ֲ��ΑB(t��i)������(j��)ÿ�_(t��i)܇�v�ų���ú������һ����̼���۷e�����L(f��ng)�C(j��)���\(y��n)�D(zhu��n)��r����Ȼ�L(f��ng)�ȵ�Ӱ��M(j��n)��ģ�M��
3.4����ģ������������
�������ڌ�(du��)��ͨ�����L(f��ng)�٣���(d��ng)ǰ��Ⱦ��r (�S�r(sh��)�g�����g�ķֲ��ΑB(t��i))�ȶ���ģ�M�Ļ��A(ch��)�ϣ������]��(d��ng)ǰ��VI��C0��(sh��)�y(c��)ֵ������ģ����Փ�M(j��n)�����ݣ�������(y��u)������������߀ͬ�r(sh��)�ƶ��c���(z��i)����ͨ�¹ʵȾo����r����ͻ׃�r(sh��)�ľȞ�(z��i)ͨ�L(f��ng)������ϵ�y(t��ng)ԭ�͵Ŀ��w��(g��u)����D4��
4.�Y(ji��)���Z
ԓ�L��·����ǰ��ʽ����ģ��ͨ�L(f��ng)����ϵ�y(t��ng)ԭ���O(sh��)Ӌ(j��)�о����H�H���L��·��������ǰ��ʽͨ�L(f��ng)����ϵ�y(t��ng)�_�l(f��)�ĵ�һ�����P��Ŀǰ�ѽ�(j��ng)����˻���ԓԭ�͵��o�B(t��i)(��������(n��i)�Ŀ՚�������ͨ�����鲻�S�r(sh��)�g׃���ĺ㶨��̎��)�����ơ��x����ϸ��ٹ�·�ڽ��еı�������(�ζ��L4026 m�����L����)����ɽƺ����(�ζ��L2500 m�����L����)���о������й��̣��������(g��)ϵ�y(t��ng)�_�l(f��)��
�����īI(xi��n)��
[1]Japan Highway Public Corporation Research Institu-te. Highway Technology, No 9,1997,12.
[2]JTJ 026��1��1999����·����ͨ�L(f��ng)�����O(sh��)Ӌ(j��)Ҏ(gu��)��[S]��
(���ā�Դ�����ʡ��ľ�����W(xu��)��(hu��) �ď��W(w��ng)�j(lu��)�������t ���S�S �� �ď� ����)
